Biorobotics: Minimally Invasive Surgery in Orthopaedic Trauma and Robots for Rehabilitation
Nowadays robotic technologies are increasingly spreading in several scenarios: from the daily living to clinical areas. Biorobotics is more and more entering the medical practice, assisting clinicians and surgeons in trauma and orthopedics, minimally invasive surgery, laparoscopic devices as well as rehabilitation orthoses. From this perspective, the research of novel in-silico solutions, coupled to a better understanding of physiological systems through experimental investigations, could lead to the development of new and more effective systems and devices. Computer Assisted Orthopaedic Surgery (CAOS), although cited since 1990, is still an active research discipline bringing together orthopedic surgeons with traditionally technical disciplines, such as engineering, computer science and robotics. The key idea behind CAOS is that operative outcomes will be strongly improved through the use of computer technology. CAOS technologies can indeed allow to plan operations an advance, to get feedbacks in real time in the operation room, as well as to measure and evaluate post-operative outcomes.
Pubblicazioni attinenti:
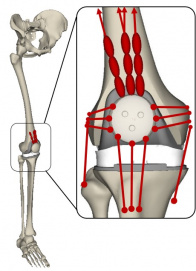
Putame G., Terzini M., Bignardi C., Beale B., Hulse D., Zanetti E., Audenino A.L. Surgical Treatments for Canine Anterior Cruciate Ligament Rupture: Assessing Functional Recovery Through Multibody Comparative Analysis. Front Bioeng Biotech, vol 7, pp. 1–11, 2019. http://hdl.handle.net/11583/2749299
Zanetti E.M., Bignardi C., Terzini M., Putame G., Audenino A.L. A multibody model for the optimization of hip arthroplasty in relation to range of movement. Australas Med J. vol: 11(10), pp. 486–91, 2018. http://hdl.handle.net/11583/2732026
Terzini M., Zanetti E.M., Audenino A.L., Putame G., Gastaldi L., Pastorelli S., Panero E., Sard A., Bignardi C. Multibody modelling of ligamentous and bony stabilizers in the human elbow. Muscle Ligaments Tendons J, vol. 07(04), pp. 493-502, 2017. http://hdl.handle.net/11583/2714549
Zanetti E.M., Terzini M., Mossa L., Bignardi C., Costa P., Audenino A.L., Vezzoni A. A structural numerical model for the optimization of double pelvic osteotomy in the early treatment of canine hip dysplasia. Vet Comp Orthop Traumatol, vol. 30(4), pp. 1-9, 2017. http://hdl.handle.net/11583/2700099